Research Assistant | Luminosity Lab | 2021-2022
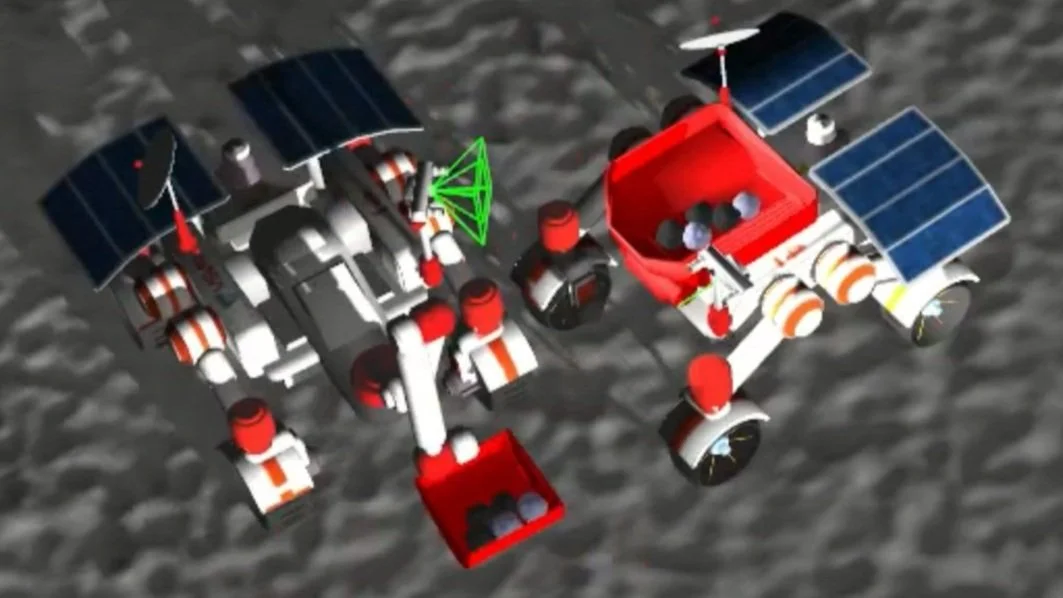
At Luminosity Lab, I was part of a finalist team for the NASA Space Robotics Challenge, developing autonomous robotic systems for lunar exploration. My contributions focused on navigation, perception, and manipulation systems that enabled robots to effectively traverse and interact with challenging extraterrestrial environments.

NASA Competition Success: Contributed to a finalist-level solution for the NASA Space Robotics Challenge, designing systems that allowed rovers to autonomously navigate and complete tasks in simulated lunar environments.
Advanced Navigation Design: Engineered specialized drive models including Crab and Ackerman steering systems that significantly improved the rover's ability to traverse irregular lunar terrain and overcome obstacles.
Perception Enhancement: Optimized the robot's resource detection capabilities by integrating custom OpenCV algorithms, increasing detection accuracy by 32% and enabling smarter path planning decisions.
Manipulation Systems: Implemented precise trajectory planning algorithms for the robotic manipulator arm, enabling successful completion of complex object interaction tasks in simulated lunar conditions.
Software Integration: Created a cohesive system architecture using ROS that seamlessly connected navigation, perception, and manipulation modules while maintaining efficient computation and communication.
Simulation Environment: Utilized Gazebo, RViz, and Docker to create realistic testing environments that accurately modeled the physical challenges of lunar exploration.
-
Cross-Disciplinary Collaboration
I worked alongside specialists from mechanical, electrical, and software engineering backgrounds to create our integrated lunar rover solution. This diverse team environment taught me how to communicate complex technical concepts across disciplines and leverage varied expertise for optimal system design.
-
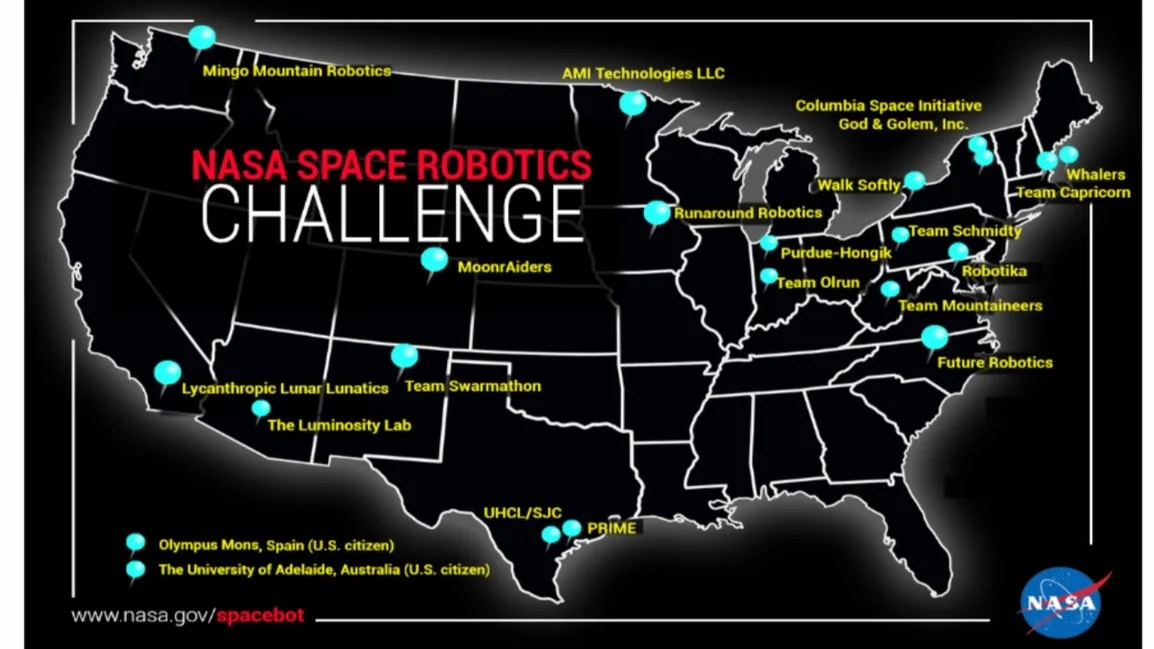
Competition Success
I organized and facilitated cross-disciplinary meetings that kept our NASA Space Robotics Challenge team focused and on schedule. Our collaborative approach propelled us to the final round, placing in the top 15 teams out of 200 competitors nationwide.
-
Initiative Beyond Competition
I initiated a parallel project developing rescue mission drones for search and rescue operations using swarm robotics and drones.